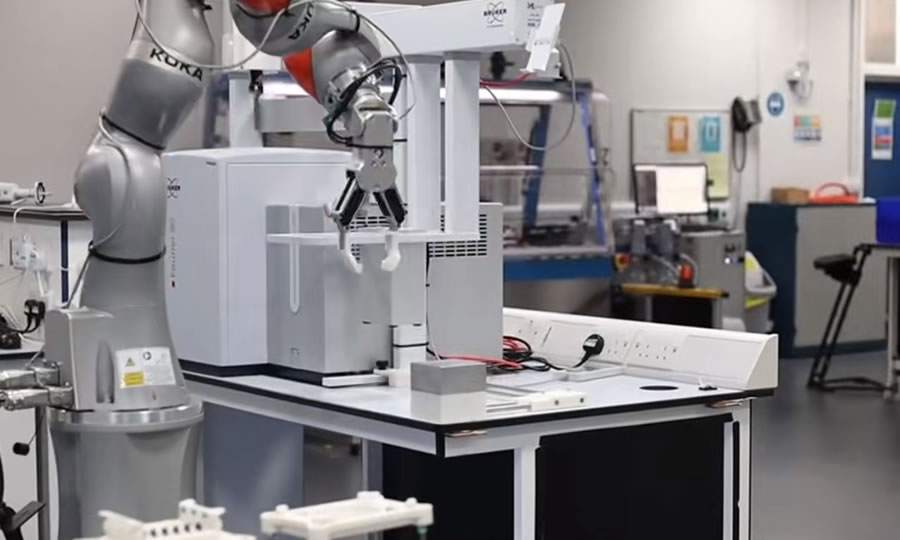
Liverpool蹊┐łFĻĀķ_░l(f©Ī)┴╦ę╗éĆė╔ČÓ─ŻēKå╬į¬ĮM│╔Ą─GČ╚╝»│╔ŪęųŪ─▄╗»Ą─╗»īWīŹ“×ŲĮ┼_Ż¼×ķÖCŲ„╚╦┘xėĶĖ³GĄ─ņ`╗ŅąįĪŻįōŽĄĮy(t©»ng)╗∙ė┌ KUKA ÖCŲ„╚╦ŲĮ┼_śŗ(g©░u)Į©Ż¼Č©╬╗Š½Č╚┐╔▀_ Ī└0.12 ║┴├ūŻ¼▓ó┼õéõ┴╦╝ż╣ŌÆ▀├Ķāx║═┴”é„ĖąŲ„Ą╚Ė„ĘNé„ĖąŲ„Ż¼─▄£╩┤_═Ļ│╔īŹ“×╩ę▓┘ū„ĪŻ
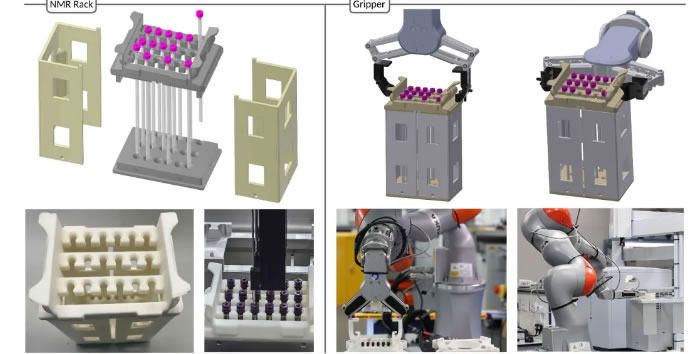
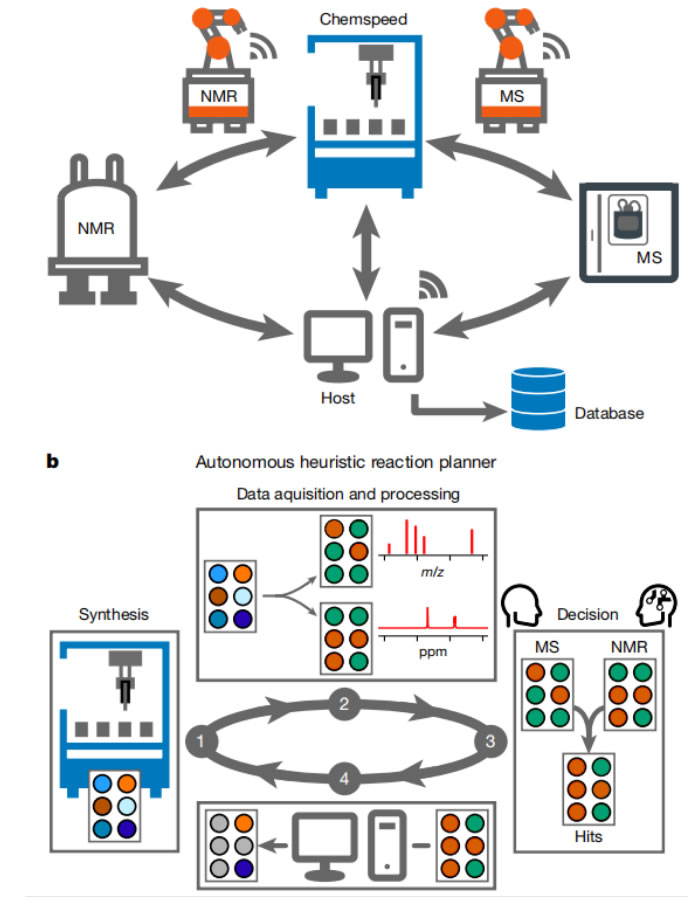
ė├ė┌ęŲäė agent ╠Ä└ĒĄ─Č©ųŲ║╦┤┼╣▓š±ÖC╝▄ĪŻū¾łDŻ║ĮMčb║├Ą─ÖC╝▄ŅA(y©┤)Ž╚čbėą║╦┤┼╣▓š±╣▄Ż¼▓óĘ┼ų├į┌ ISynth ŲĮ┼_ā╚(n©©i)Ż¼╚╗║¾ę║¾w▌ö╦═╣żŠ▀īóę║¾wĘų┼õĄĮ╣▄ūėųąŻ¼╣▄ūėėąÄ¦┐ūĄ─╔wūėŻ¼ęį▒ŃĘų┼õĪŻėęłDŻ║NMR-Agent ╩╣ė├Č©ųŲĄ─ųĖ╝ŌŻ¼╩╣Ųõ─▄ē“┤╣ų▒║═╦«ŲĮĄžūź╬š║═ęŲäėÖC╝▄ĪŻ┤╣ų▒╬š░čĘĮŽ“ė├ė┌Å─ ISynth ╝ū░Õ╔Ž╚ĪŽ┬ÖC╝▄Ż¼╦«ŲĮ╬š░čĘĮŽ“ė├ė┌īóÖC╝▄ęŲ╚ļ┼_╩Į║╦┤┼╣▓š±ūįäė▓╔śėŲ„ĪŻ
ŽĄĮy(t©»ng)Ą─║╦ą─┐žųŲå╬į¬╩ŪųŪ─▄ūįäė╗»ŽĄĮy(t©»ng)┐žųŲ├µ░ÕŻ©IAS - CPŻ®Ż¼▓╔ė├ ZeroMQ ═©ą┼ģf(xi©”)ūhŻ¼┐╔ęįīóīŹ“×╩ęĄ─Ė„ĘNāxŲ„─ŻēKŻ©╚ń║Ž│╔Ę┤æ¬(y©®ng)ŲĮ┼_ĪóUPLC©CMSŻ©│¼Gą¦ę║ŽÓ╔½ūVĪ¬┘|(zh©¼)ūVŻ®║═ NMRŻ©║╦┤┼╣▓š±Ż®Ą╚Ż®¤o┐p▀BĮėŻ¼īŹ¼F(xi©żn)īŹ“×öĄ(sh©┤)ō■(j©┤)Ą─īŹĢré„▌ö┼cūįų„Ęų╬÷ĪŻ
IAS-CP ┐╔═©▀^ÅV▓źŽ“Ė„īŹ“×?z©Īi)ŻēKé„▀fųĖ┴ŅŻ¼ī”ČÓ┼_āxŲ„▀MąąGą¦š{(di©żo)Č╚Ż¼ņ`╗Ņ┐žųŲīŹ“×▀M│╠Ż¼Ūęų¦│ųĘŪīŻśI(y©©)ė├æ¶▀Mąą║åå╬▓┘ū„Ż¼▀@ĘNņ`╗Ņąį╩╣Ųõį┌ČÓ▓Į¾E╗»īWĘ┤æ¬(y©®ng)ųąĄ─æ¬(y©®ng)ė├─▄┴”┤¾┤¾╠ß╔²ĪŻ
1.75 ├ūGĄ─ęŲäėÖCŲ„╚╦ŽĄĮy(t©»ng)ė├ė┌ĮŌøQ╠Į╦„ąį╗»īWųąĄ─╚²éĆų„ę¬å¢Ņ}Ż║ł╠(zh©¬)ąąĘ┤æ¬(y©®ng)ĪóĘų╬÷«a(ch©Żn)╬’ęį╝░Ė∙ō■(j©┤)öĄ(sh©┤)ō■(j©┤)øQČ©Ž┬ę╗▓Įū÷╩▓├┤ĪŻ
▀@ā╔éĆÖCŲ„╚╦į┌ĮŌøQ╗»īW║Ž│╔Ą─╚²éĆ▓╗═¼Lė“Ą─å¢Ņ}Ģręį║Žū„Ą─ĘĮ╩Įł╠(zh©¬)ąą▀@ą®╚╬äš(w©┤)Ī¬Ī¬ĮY(ji©”)śŗ(g©░u)ČÓśė╗»╗»īWŻ©┼c╦Ä╬’░l(f©Ī)¼F(xi©żn)ŽÓĻP(gu©Īn)Ż®Īó│¼Ęųūėų„┐═¾w╗»īW║═╣Ō╗»īW║Ž│╔ĪŻ
ĮY(ji©”)╣¹░l(f©Ī)¼F(xi©żn)Ż¼ĮĶų· AI ╣”─▄Ż¼ęŲäėÖCŲ„╚╦ū÷│÷┼c╚╦ŅÉ蹊┐╚╦åTŽÓ═¼╗“ŽÓ╦ŲĄ─øQČ©Ż¼Ą½▀@ą®øQČ©Ą─Ģrķg▒╚╚╦ŅÉ┐ņĄ├ČÓŻ¼Č°╚╦ŅÉ┐╔─▄ąĶę¬öĄ(sh©┤)ąĪĢrĪŻ
Lī¦įōĒŚ─┐Ą─└¹╬’Ųų┤¾īW╗»īW║═▓─┴Žäō(chu©żng)ą┬╣żÅSŽĄĄ─ Andrew Cooper Į╠╩┌ĮŌßīšfŻ║
Ī░╗»īW║Ž│╔蹊┐╝╚║─Ģrėų░║┘FŻ¼¤ošō╩Ūį┌╬’└ĒīŹ“×▀Ć╩ŪøQČ©Ž┬ę╗▓Įę¬ū÷╩▓├┤īŹ“×ĘĮ├µŻ¼ę“┤╦╩╣ė├ųŪ─▄ÖCŲ„╚╦╠ß╣®┴╦ę╗ĘN╝ė╦┘▀@ę╗▀^│╠Ą─ĘĮĘ©ĪŻ
Ī░«ö╚╦éāŽļĄĮÖCŲ„╚╦║═╗»īWūįäė╗»ĢrŻ¼╦¹éā═∙═∙Ģ■ŽļĄĮ╗ņ║Ž╚▄ę║Īó╝ė¤ßĘ┤æ¬(y©®ng)Ą╚ĪŻ▀@╩ŪŲõųąĄ─ę╗▓┐ĘųŻ¼Ą½øQ▓▀ų┴╔┘┐╔─▄═¼śė║─ĢrĪŻī”ė┌╠Į╦„ąį╗»īWė╚Ųõ╚ń┤╦Ż¼ę“×ķ─Ń▓╗┤_Č©ĮY(ji©”)╣¹ĪŻ╦³╔µ╝░╗∙ė┌ČÓéĆöĄ(sh©┤)ō■(j©┤)╝»Ą─ĻP(gu©Īn)ė┌─│╩┬╩Ūʱėą╚żĄ─╬ó├ŅĄ─╔ŽŽ┬╬─øQ▓▀ĪŻī”ė┌蹊┐╗»īW╝ęüĒšfŻ¼▀@╩Ūę╗ĒŚ║─ĢrĄ─╚╬äš(w©┤)Ż¼Ą½ī” AI üĒšfģs╩Ūę╗éĆ╝¼╩ųĄ─å¢Ņ}ĪŻ
øQ▓▀╩Ū╠Į╦„ąį╗»īWųąĄ─ę╗éĆĻP(gu©Īn)µIå¢Ņ}ĪŻ└²╚ńŻ¼čąŠ┐╚╦åT┐╔─▄Ģ■▀\ąąČÓéĆįć“×Ę┤æ¬(y©®ng)Ż¼╚╗║¾øQČ©ų╗Ę┼┤¾Ę┤æ¬(y©®ng)«a(ch©Żn)┴┐G╗“ėą╚ż«a(ch©Żn)╬’Ą─Ę┤æ¬(y©®ng)ĪŻ▀@ī” AI üĒšf║▄ļyū÷ĄĮŻ¼ę“×ķ─│╝■╩┬╩ŪʱĪ░ėą╚żĪ▒ŪęųĄĄ├ūĘŪ¾Ą─å¢Ņ}┐╔─▄ėąČÓĘN▒│Š░Ż¼└²╚ńĘ┤æ¬(y©®ng)«a(ch©Żn)╬’Ą─ą┬ĘfąįŻ¼╗“š▀║Ž│╔┬ĘŠĆĄ─│╔▒Š║═Å═(f©┤)ļsąįĪŻ
Ū░└¹╬’Ųų┤¾īW▓®╩┐╔·Īó╗»īWŽĄ▓®╩┐║¾čąŠ┐åT Sriram Vijayakrishnan ▓®╩┐Lī¦┴╦║Ž│╔╣żū„Ż¼╦¹ĮŌßīšfŻ║Ī░«ö╬ę╣źūx▓®╩┐īW╬╗ĢrŻ¼╬ę╩ų╣ż═Ļ│╔┴╦įSČÓ╗»īWĘ┤æ¬(y©®ng)ĪŻ═©│ŻŻ¼╩š╝»║═┼¬ŪÕ│■Ęų╬÷öĄ(sh©┤)ō■(j©┤)╦∙ąĶĄ─Ģrķg┼cįO(sh©©)ų├īŹ“ץ─Ģrķgę╗śėķLĪŻ«ö─·ķ_╩╝ūįäė╗»╗»īWĢrŻ¼▀@éĆöĄ(sh©┤)ō■(j©┤)Ęų╬÷å¢Ņ}ūāĄ├Ė³╝ėć└ųžĪŻ─ŃĮK┐╔─▄Ģ■č═ø]į┌öĄ(sh©┤)ō■(j©┤)ųąĪŻ
Ī░╬ęéā═©▀^×ķÖCŲ„╚╦śŗ(g©░u)Į© AI ▀ē▌ŗüĒĮŌøQ▀@éĆå¢Ņ}ĪŻ▀@īó╠Ä└ĒĘų╬÷öĄ(sh©┤)ō■(j©┤)╝»ęįū÷│÷ūįų„øQ▓▀ -- └²╚ńŻ¼╩Ūʱ└^└m(x©┤)▀MąąĘ┤æ¬(y©®ng)Ą─Ž┬ę╗▓ĮĪŻ▀@éĆøQČ©╗∙▒Š╔Ž╩Ū╝┤ĢrĄ─Ż¼╦∙ęį╚ń╣¹ÖCŲ„╚╦į┌┴Ķ│┐ 3Ż║00 ▀MąąĘų╬÷Ż¼─Ū├┤╦³īóį┌┴Ķ│┐ 3Ż║01 ų«Ū░øQČ©ī”▀Mš╣Ą─Ę┤æ¬(y©®ng)ĪŻŽÓ▒╚ų«Ž┬Ż¼╗»īW╝ę┐╔─▄ąĶę¬ÄūéĆąĪĢr▓┼─▄×gė[ŽÓ═¼Ą─öĄ(sh©┤)ō■(j©┤)╝»ĪŻ
Cooper Į╠╩┌ča│õšfŻ║Ī░┼cė¢ŠÜėą╦žĄ─蹊┐╚╦åTŽÓ▒╚Ż¼▀@ą®ÖCŲ„╚╦Ą─▒│Š░ÅVČ╚▌^ąĪŻ¼ę“┤╦į┌─┐Ū░Ą─ą╬╩ĮŽ┬Ż¼╦³▓╗Ģ■ėą"ņ`╣Ōš¦¼F(xi©żn)"Ą─Ģr┐╠ĪŻĄ½ī”ė┌╬ęéāį┌▀@└’Į╗ĮoĄ─╚╬äš(w©┤)Ż¼AI ▀ē▌ŗį┌▀@╚²éĆ▓╗═¼Ą─╗»īWå¢Ņ}╔Žū÷│÷Ą─øQ▓▀╗“ČÓ╗“╔┘┼c║Ž│╔╗»īW╝ęŽÓ═¼Ż¼Č°Ūę╦³į┌šŻč█ķgū÷│÷▀@ą®øQČ©ĪŻöUš╣ī” AI Ą─╔ŽŽ┬╬─└ĒĮŌę▓ėą║▄┤¾Ą─┐šķgŻ¼└²╚ńŻ¼═©▀^╩╣ė├┤¾ą═šZčį─Żą═īóŲõų▒Įė▀BĮėĄĮŽÓĻP(gu©Īn)Ą─┐ŲīW╬─½IĪŻ
╬┤üĒŻ¼└¹╬’ŲųłFĻĀŽŻ═¹└¹ė├▀@ĒŚ╝╝ąg(sh©┤)üĒ░l(f©Ī)¼F(xi©żn)┼c╦Ä╬’║Ž│╔ŽÓĻP(gu©Īn)Ą─╗»īWĘ┤æ¬(y©®ng)Ż¼ęį╝░ė├ė┌Č■č§╗»╠╝▓Č½@Ą╚æ¬(y©®ng)ė├Ą─ą┬▓─┴ŽĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |