ÖCŲ„╚╦Ą─╝╝ągäōą┬╚╬äšų„ę¬į┌ė┌╚╦ą╬ÖCŲ„╚╦ĻPµI╝╝ągĄ─═╗ŲŲŻ¼Ųõųąį┌╚╦ą╬ÖCÖCŲ„╚╦▒Š¾w╔ŽĄ─ųžę¬╝╝ąg╚╬äšį┌ė┌ķ_░l╗∙ė┌╚╦╣żųŪ─▄┤¾─Żą═Ą─╚╦ą╬ÖCŲ„╚╦Ī░┤¾─XĪ▒┼c
ķ_░l┐žųŲ╚╦ą╬ÖCŲ„╚╦▀\äėĄ─Ī░ąĪ─XĪ▒ĪŻ┤¾─Żą═ū„×ķ▒¼╗Ą─╚╦╣żųŪ─▄Ė┼─ŅŻ¼═Ųäė┴╦╚╦ą╬ÖCŲ„╚╦┤¾─XĄ─ą╬│╔Ż¼ų·┴”╚╦ą╬ÖCŲ„╚╦Š▀ėą╚╦Ą─Ėąų¬ĪóĮ╗╗ź┼cøQ▓▀─▄┴”Ż╗ī”
ė┌┐žųŲŽĄĮy╚įį┌Ūą╚ļųąĪŻ
Ėąų¬ĪóĮ╗╗ź┼cøQ▓▀
ČÓ─ŻæB┤¾─Żą═į÷ÅŖ╚╦ÖCĮ╗╗źŻ¼īŹ¼F
ī”╚╦ŅÉęŌłDĄ─└ĒĮŌŻ¼ī”Å═ļs═Ō▓┐Łh
Š│Ą─└ĒĮŌ┼cšJų¬Ż¼ų·┴”ą╬│╔øQ▓▀Ż║
┤¾─Żą═┐╔ų▒Įėė├ė┌ī”ŁhŠ│Ą─└ĒĮŌ, ▓ó═©▀^╠ß╩Šį~╩╣ų«▌ö│÷ĮYśŗ╗»ā╚
╚▌╚ń┐žųŲ┤·┤aĪó╚╬äšĘųĮŌĄ╚ųĖ┴Ņ
└¹ė├ČÓ─ŻæB┤¾─Żą═ī”ŁhŠ│▀MąąĮ©
─Ż, īŹ¼FŠ▀╔ĒųŪ─▄ī”┐šķgą┼ŽóĄ─
ČÓ─ŻæB└ĒĮŌ
ÖCŲ„╚╦─▄ē“Å─öĄō■ųąīW┴ĢøQ▓▀┼c
ęÄäØ▓▀┬įŻ¼╗∙ĄA─Żą═×ķÖCŲ„╚╦øQ
▓▀┼cęÄäØę²╚ļ┴╦žSĖ╗Ą─Ž╚“×ų¬ūRĪŻ
┐žųŲ
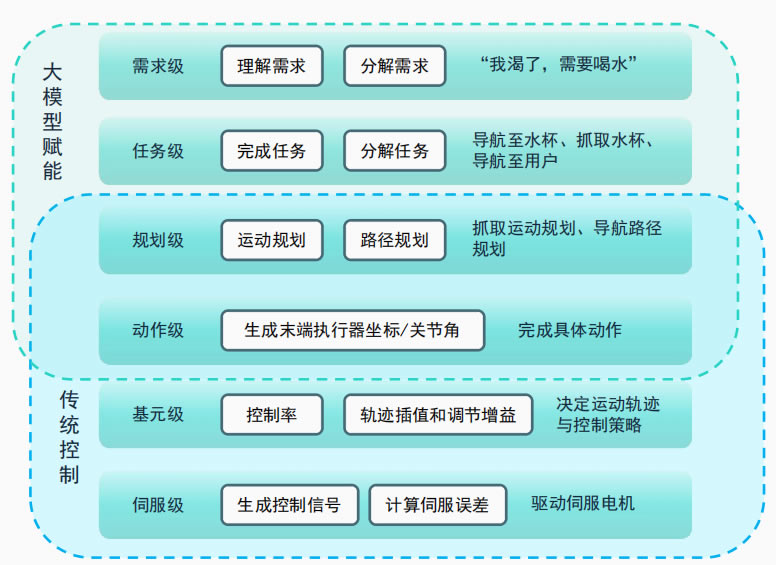
┤¾─Żą═į┌┐žųŲ╔ŽĄ─ų·┴”ų„ę¬╝»ųąė┌┤¾─Żą═╠Ä└ĒŁhŠ│ė^▓ņ┼c╠ß╩ŠŻ¼▌ö│÷äėū„ą“
┴ąŻ¼äėū„ą“┴ą┐╔ęį╩Ūę╗ŽĄ┴ąĻP╣ØĮŪČ╚╗“─®Č╦ł╠ąąŲ„Ą─╬╗ū╦┼cŖAū”ķ_║ŽöĄō■Ż¼
▀@ą®ą“┴ąīóų▒Įėė├ė┌┐žųŲÖCŲ„╚╦Ą─▀\äėĪŻ
įŁ╔·ÖCŲ„╚╦┤¾─Żą═ERA-42, š╣╩Š┴╦┼cūįčą╬ÕųĖņ`Ū╔╩ųąŪäėXHAND1 ĮY║Ž║¾Ą─ņ`Ū╔▓┘ū„─▄┴”,─▄ē“═Ļ│╔│¼▀^100ĘNÅ═ļsņ`Ū╔Ą─ ▓┘ū„╚╬äš,╩Ūšµš²Ą─Š▀╔Ē┤¾─Żą═
ŲšČ╔ÖCŲ„╚╦╠ß│÷┴╦ Robot-to-Everything ╝▄śŗŻ¼īŹ¼F╚f╬’╗ź┬ōŻ¼╚½ł÷Š░Ą─ųŪ─▄╔·æB;┬╩Ž╚═Ļ│╔┴╦īŻė├ĪóŅÉ╚╦ą╬Īó╚╦ą╬╚²ŅÉÖC Ų„╚╦Ą─═Ļš¹«aŲĘ▓╝Šų
ÖCŲ„╚╦Ž±╚╦ę╗śė╩╣ė├╣żŠ▀Ą─ņ`Ū╔╩ų,╩Ū╠ß╔²ÖCŲ„╚╦╚ßąį▓┘ū„─▄┴”Ą─ĻPµI▓┐╝■,╩Ū╚ßąįųŲįņ▒▄▓╗ķ_Ą─ę╗Łh;ņ`Ū╔╩ų╣ż│╠┴┐š╝ō■Optimus╣ż│╠┴┐Ą─50%,ņ`Ū╔╩ų╩ŪÖCŲ„╚╦ū▀Ž“Ī░║├ė├Ī▒Ą─ĻPµI
ŪĘ“īäė╩ųė▓╝■╝»│╔Č╚Ė▀Ż¼š¹¾wŽĄĮy║åØŹĖ▀ą¦Īó¾wĘeąĪĪó┘|┴┐▌pŻ¼▒Ńė┌▀Mąąäė┴”īWĘų╬÷;┤µį┌╣”─▄ąį▓╗ūŃ,ī”ė┌Š½Č╚ę¬Ū¾▒╚▌^Ė▀Ą─╩ųųĖŠ½Ū╔┐žųŲ¤oĘ©ä┘╚╬
Š▀ėą═Ļ╚½┐╔ųžÅ═Ą─▀\äė▄ē█E,▀m║Ž─│ą®╣”─▄ąį║═Š½╝Ü▓┘ū„▌^Ė▀Ą─ł÷║Ž,į┌╣żśIł÷║ŽŻ¼ └²╚ńĮMčbĪó£y┴┐Ą╚ŪķørŽ┬ėąĖ³║├Ą─▒Ē¼F,ø]ėą║Ž└ĒĄ─▀\äėīWĘų╬÷┐žųŲĢrŻ¼š¹¾wĄ─ņ`╗Ņąį▓Ņ
ÖCŲ„╚╦Ą─ė|Ėąņ`Ū╔╩ųLinker HandŠ▀éõ20éĆų„äėūįė╔Č╚,░³└©╚ßąįļŖūėŲż─w,īŹ¼FŠ½╝Üė|ėXĖąų¬,śŗĮ©╚½Ū“ūŅ┤¾Ą─ņ`Ū╔▓┘ū„öĄō■╝»,░³║¼┴╦┤¾┴┐Ą─╚╦╩ų▓┘ū„öĄō■,Ė▓╔w┴╦Ė„ ĘNÅ═ļsĄ─ūź╚Ī║═▓┘ū„╚╬äš
«ö╚╦éāšJ×ķÖCŲ„╚╦╩ŪėąęŌłDĄ─┤·└ĒĢrŻ¼╦¹éāĄ─┤¾─XęįŅÉ╦ŲĄ─ĘĮ╩Į╠Ä└Ēūį╝║║═ÖCŲ„╚╦Ą─ąąäėĮY╣¹,ęŌłDÜwę“į┌╚╦ÖCĮ╗╗źųąŲų°ų┴ĻPųžę¬Ą─ū„ė├,┐╔─▄░³└©═©▀^čįšZųĖ┴ŅĄ╚ĘŪĮ╗╗źąį╩ųČ╬üĒš{š¹╚╦éāī”ÖCŲ„╚╦ęŌłDĄ─Ėąų¬
ęŲäėÖCŲ„╚╦ŽĄĮyė├ė┌ĮŌøQ╠Į╦„ąį╗»īWųąĄ─╚²éĆų„ę¬å¢Ņ}ęį╝░Ė∙ō■öĄō■øQČ©Ž┬ę╗▓Įū÷╩▓├┤,ęŲäėÖCŲ„╚╦ū÷│÷┼c╚╦ŅÉ蹊┐╚╦åTŽÓ═¼╗“ŽÓ╦ŲĄ─øQČ©▒╚╚╦ŅÉ┐ņĄ├ČÓ
┤¾─Żą═┐╔╝ė┐ņ╚╦ą╬ÖCŲ„╚╦Å═ļs╚╬äšė¢ŠÜ╦┘Č╚,╠ß╔²╚╬äš╔·│╔╦┘Č╚╝░┐sČ╠└ĒĮŌų▄Ų┌;1 ╠ß╔²╚╦ą╬ÖCŲ„╚╦šZčį╠Ä└Ē─▄┴” 2 ╠ß╔²╚╦ą╬ÖCŲ„╚╦ł÷Š░└ĒĮŌ─▄┴” 3 ╠ß╔²╚╦ą╬ÖCŲ„╚╦▀\äė┐žųŲ─▄┴” 4 ╠ß╔²╚╦ą╬ÖCŲ„╚╦öĄō■ė¢ŠÜ─▄┴”
NLP ┤¾─Żą═į┌šZčįĄ─Ųń┴xĪó╬─╗»▓Ņ«É╝░ČÓśė╗»ĪóŪķĖąĘų╬÷└¦ļy;CV ┤¾─Żą═╦ŃĘ©╠Ä└ĒÅ═ļsŻ╗ČÓ─ŻæB┤¾─Żą═╚┌║Ž▓╗═¼─ŻæBĄ─ą┼Žó▓ó╠ßĖ▀─Żą═Ą─ś╦ūR─▄┴”
NLP ┤¾─Żą═╩Ū╚╦╣żųŪ─▄ŅIė“Ą─ųžę¬čąŠ┐ĘĮŽ“,CV┤¾─Żą═╩ŪųĖ╗∙ė┌╔ŅČ╚īW┴ĢĄ─ėŗ╦ŃÖCęĢėX─Żą═,ČÓ─ŻæB┤¾─Żą═╩ŪųĖīó╬─▒ŠĪółDŽ±ĪóęĢŅlĪóę¶ŅlĄ╚ČÓ─ŻæBą┼Žó┬ō║ŽŲüĒ▀Mąąė¢ŠÜĄ──Żą═
ÖCŲ„╚╦┤¾─X╠ßĖ▀╚╦ą╬ÖCŲ„╚╦Ą─╚╦-ÖC-ŁhŠ│╣▓╚┌Į╗╗ź─▄┴”,ų¦ō╬╚½ł÷Š░┬õĄžæ¬ė├;ÖCŲ„╚╦ąĪ─X╠ß╔²╚╦ą╬ÖCŲ„╚╦ĘŪ ĮYśŗ╗»ŁhŠ│Ž┬╚½╔Ēģfš{¶ö░¶ęŲäėĪóņ`Ū╔▓┘ū„╝░╚╦ÖCĮ╗╗ź─▄┴”