ÖCŲ„╚╦┼cęĢėXŽĄĮyĄ─╔ŅČ╚╚┌║ŽŻ¼┘xėĶÖCŲ„╚╦ Ī░č█Š”Ī▒ ║═ Ī░┤¾─XĪ▒Ż¼╩╣ŲõÅ─ Ī░│╠ą“╗»ł╠ąą╣żŠ▀Ī▒ ╔²J×ķŠ▀éõŁhŠ│Ėąų¬Īóūįų„øQ▓▀─▄┴”Ą─ųŪ─▄¾wĪŻ▀@ĘNĮM║Ž▓╗āH╠ß╔²┴╦ÖCŲ„╚╦į┌Å═ļsł÷Š░ųąĄ─▀mæ¬ąįŻ¼Ė³═Ųäė┴╦╣żśIūįäė╗»Īóßt»¤Īó╬’┴„Ą╚ŅIė“Ž“╚ßąį╗»ĪóųŪ─▄╗»▐Dą═Ż©łD 44Ż®ĪŻ─┐Ū░ų„┴„Ą─ÖCŲ„ęĢėXĘĮ╩ĮĘų×ķ 2DęĢėX║═ 3D ęĢėXā╔┤¾ŅÉĪŻ2D ╝╝ągŲ▓Į▌^įńŻ¼╝╝ąg║═æ¬ė├ę▓ŽÓī”│╔╩ņĪŻŽÓ▌^ė┌ 2D ęĢėXŻ¼3D ęĢėXĖ³ĮėĮ³╚╦č█Ż¼Ųõ║╦ą─į┌ė┌ī” 3D Äū║╬öĄō■Ą─▓╔╝»║═└¹ė├Ż¼į┌é„ĮyĄ─łDŽ±Ņü╔½ą┼Žó═Ōį÷╝ė┴╦┐šķgŠSČ╚Ż¼┐╔½@╚Ī╬’¾wĄ─╔ŅČ╚ą┼ŽóŻ¼īŹ¼FČÓŠSČ╚Č©╬╗ūRäeĪŻ
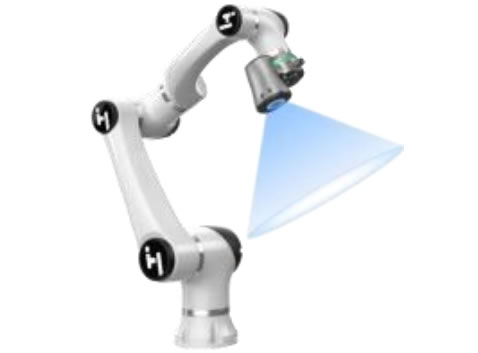
į┌īŹļHæ¬ė├ųąÖCŲ„╚╦+ęĢėX┐╔īŹ¼FČÓł÷Š░╝╝ąg═╗ŲŲĪŻ╩ųč█ģfš{Ż©Eye-in-HandŻ®Ż║īóŽÓÖC░▓čbė┌ģfū„ÖCąĄ▒█─®Č╦Ż¼═©▀^äėæBąŻ£╩╦ŃĘ©Ż©╚ń Tsai ś╦Č©Ę©Ż®Ž¹│²▀\äėš`▓ŅŻ¼īŹ¼F Ī░ęŲäėųąīŹĢrČ©╬╗Ī▒Ż╗└²╚ńŻ¼╚AčžÖCŲ„╚╦Ż©HUAYANŻ®╝ż╣Ō║ĖĮėŽĄĮy▓╔ė├╩ųč█ęĢėXŻ¼┐╔į┌ÖCąĄ▒█ęŲäėĢrĖ·█Ö║Ė┐pŲ½▓Ņ▓óīŹĢrš{š¹Ż¼║ĖĮė║ŽĖ±┬╩┤¾Ę∙╠ß╔²ĪŻČÓŽÓÖCģf═¼Ż║į┌Ų¹▄ć┐éčbł÷Š░▓┐╩ČÓ┼_ęĢėXŽÓÖCŻ¼Å─▓╗═¼ĮŪČ╚Æ▀├Ķ▄ć╔Ēū╦æBŻ¼ÖCŲ„╚╦Ė∙ō■╚┌║ŽöĄō■š{š¹čb┼õ┴”Č╚Ż¼┤¾Ę∙ĮĄĄ═▄ćķT░▓čbķgŽČš`▓ŅĪŻ
╬┤üĒīóėąįĮüĒįĮČÓĄ─ģfū„ÖCŲ„╚╦┤Ņ▌dęĢėXŽĄĮyęįØMūŃ╣żÅS╚ßąį╗»ĪóųŪ─▄╗»Ą─╔·«aąĶŪ¾ĪŻ
ģfū„ÖCŲ„╚╦į┌╩ął÷╔ŽĄ─│╔╣”æ¬ė├Ż¼ ėąų·ė┌╠ßĖ▀╚╦éāī”ÖCŲ„╚╦╝╝ągĄ─šJų¬Č╚║═Įė╩▄Č╚Ż¼×ķ╚╦ą╬ÖCŲ„╚╦Ą─╩ął÷═ŲÅV┤“Ž┬╗∙ĄA;ę╗ą®×ķ╚╦ą╬ÖCŲ„╚╦čą░lĄ─Ė▀ąį─▄é„ĖąŲ„║═▌p┴┐╗»▓─┴ŽŻ¼┐╔─▄Ģ■ųØuæ¬ė├ĄĮģfū„ÖCŲ„╚╦ųąŻ¼╠ßĖ▀ģfū„ÖCŲ„╚╦Ą─ąį─▄║═ĖéĀÄ┴”
╣żū„šŠ▒žĒÜįOų├Ė„ĘNé„ĖąŲ„,«ö╚╦åT¤o╣╩▀M╚ļĘ└ūoģ^ĢrŻ¼┴ó╝┤╩╣╣żū„šŠųąĄ─Ė„ĘN▀\äėįOéõ═Żų╣╣żū„;╗“ÖCŲ„╚╦╝░Ųõų▄▀ģįOéõ▒žĒÜį┌ĮĄ╦┘Śl╝■Ž┬åóäė▀\▐D
ÖCŲ„╚╦╩ų═¾╦∙─▄ūź╚ĪĄ─┘|┴┐╩ŪÖCŲ„╚╦ę╗éĆųžę¬ąį─▄ųĖś╦;ÖCŲ„╚╦Ą─├¹┴x╣żū„┐šķg╩ŪÖCŲ„╚╦Ą─┴Ē ę╗ éĆųžę¬ąį─▄ųĖś╦;ūįė╔Č╚╩Ūʱ┐╔ęįį┌ū„śIĘČć·ā╚ØMūŃū„śIĄ─ū╦æBę¬Ū¾
╣╠Č©┬ĘÅĮī¦ę²ĘĮ╩Į╩Ūį┌ŅAČ©ąą±é┬ĘÅĮ╔ŽįOų├ī¦ę²ė├Ą─ą┼Žó├ĮĮķ╬’,ÖCŲ„╚╦į┌ąą±é▀^│╠ųąīŹĢrÖz£yą┼Žó├ĮĮķ╬’Ą─ą┼ŽóČ°Ą├ĄĮī¦ę²;ūįė╔┬ĘÅĮī¦ę²ĘĮ╩Į╩Ūį┌AGV╔Žā”┤µų°ąą±éģ^ė“▓╝Šų╔ŽĄ─│▀┤ńū°ś╦Ż¼═©▀^ę╗Č©Ą─ĘĮĘ©ūRäe▄ć¾wĄ─«öŪ░ĘĮ╬╗
AGV┐žųŲŲ„╩Ū╠Ä└ĒŲ„║╦ą─;“īäėŽĄĮy╝»│╔┴╦ąą±é┼c▐DŽ“ā╔éĆå╬į¬;ī¦║ĮŽĄĮyĮYśŗŠo£ÉĪó╩╣ė├║åå╬Īóī¦║ĮĘČć·īÆĪóī¦║ĮŠ½Č╚Ė▀;ūįäė│õļŖŽĄĮy┐╔┐ņ╦┘ča│õōp╩¦Ą─ļŖ┴┐
čb┼õÖCŲ„╚╦ė╔ų„¾wĪó“īäėŽĄĮy║═┐žųŲŽĄĮy╚²éĆ╗∙▒Š▓┐ĘųĮM│╔,ėą3Ī½6éĆ▀\äėūįė╔Č╚Ż¼Ųõųą═¾▓┐═©│Żėą1Ī½3éĆ ▀\äėūįė╔Č╚,┴Ń╝■╣®Įočbų├ų„ę¬ėąĮo┴ŽŲ„║══ą▒PĄ╚
ęŲäėÖCŲ„╚╦ŽĄĮy─Żą═─┐Ū░┐╔Ęų×ķ▀\äėīW─Żą═║═äė┴”īW─Żą═ā╔┤¾ŅÉŻ¼ā╔ĘNŪķørŽ┬ÖCŲ„╚╦▀\ äė┐žųŲėą▓╗═¼Ą─┐žųŲūā┴┐;ęį╦─▌åÖCŲ„╚╦×ķ└²Ż¼Ųõųą║¾├µā╔▌å╩Ūd┴ó“īäė▌åŻ¼Ū░├µā╔▌å╩Ū╚fŽ“▌å
é„äėÖCśŗė├üĒ░č“īäėŲ„Ą─▀\äėé„▀fĄĮĻP╣Ø║═äėū„▓┐╬╗ĪŻÖCŲ„╚╦│Żė├Ą─é„äėÖCśŗėąĮzĖ▄é„äėÖCśŗĪó²X▌åé„äėÖCśŗĪó┬▌ą²é„äėÖCśŗĪóĦ╝░µ£é„äėĪó▀BŚU╝░═╣▌åé„äė
ęŲäėÖCŲ„╚╦Ą─ęŲäėÖCśŗą╬╩Įų„ę¬ėąŻ║▄ć▌å╩ĮęŲäėÖCśŗŻ╗┬─Ħ╩ĮęŲäėÖCśŗŻ╗═╚ūŃ╩ĮęŲäėÖCśŗĪŻ┤╦═ŌŻ¼▀Ćėą▓Į▀M╩ĮęŲäėÖCśŗĪó╚õäė╩ĮęŲäėÖCśŗĪó╗ņ║Ž╩ĮęŲäėÖCśŗ║═╔▀ąą╩ĮęŲäėÖCśŗĄ╚
ūįė╔Č╚╩ŪųĖÖCŲ„╚╦╦∙Š▀ėąĄ─¬Ü┴óū°ś╦▌S▀\äėĄ─öĄ─┐,┐╔─▄╔┘ė┌6éĆūįė╔Č╚,ę▓┐╔─▄ČÓė┌6éĆūįė╔Č╚;ÖCŲ„╚╦Š½Č╚░³└©Č©╬╗Š½Č╚║═ųžÅ═Č©╬╗Š½Č╚,╚ĪøQė┌Č©╬╗ĘĮ╩Į,▀\äė╦┘Č╚,┐žųŲĘĮ╩ĮĪó▒█▓┐äéČ╚,“īäėĘĮ╩ĮĪóŠÅø_ĘĮĘ©Ą╚ę“╦ž
ÖCŲ„╚╦Ą─“īäėĘĮ╩Įų„ę¬ ėąę║ē║ĪóÜŌē║ĪóļŖÜŌŻ¼ęį╝░ą┬ą═“īäėĘĮ╩Į;┐╔ęį▀MąąÖCąĄĮYśŗŽĄĮyĄ─įOėŗ;ÖCŲ„╚╦▀\äėą╬╩Į╗“ęŲäėÖCśŗĄ─▀xō±;é„äėŽĄĮyįOėŗėą│ŻęŖĄ─²X▌åé„äėĪóµ£é„äėĪó╬ü▌å╬üŚUé„äė║═ąąąŪ²X▌åé„äė
ā╚é„ĖąŲ„│Żį┌┐žųŲŽĄĮyųąŻ¼ė├ū„Ę┤üį¬╝■Ż¼Öz£yÖCŲ„╚╦ūį╔ĒĄ─ĀŅæBģóöĄ;═Ōé„ĖąŲ„ų„ę¬ė├üĒ£y┴┐ÖCŲ„╚╦ų▄▀ģŁhŠ│ģóöĄ,ę▓┐╔ęįė├üĒÖz£yšŽĄK╬’