| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ČÓųĖņ`Ū╔╩ųėųĘQČÓųĖČÓĻP╣ØÖCąĄ╩ųŻ¼╩Ūę╗ĘN▓ó┬ō╝ė┤«┬ōą╬╩ĮĄ─ÖCŲ„╚╦Ż¼ ę╗░Ńė╔╩ųšŲ║═ 3Ī½5éĆ╩ųųĖĮM│╔Ż¼├┐éĆ╩ųųĖėą3Ī½4éĆĻP╣ØĪŻė╔ė┌ŲõŠ▀ėąČÓéĆĻP╣Ø(Ī▌9),╣╩┐╔ęįī”Äū║§╚╬ ęŌĄ─╬’¾w▀Mąąūź│ų╝░▓┘ū„ĪŻ╚ń╣¹░▓čbėąųĖČ╦┴”é„ĖąŲ„║═ė|ėXé„ĖąŲ„Ż¼ī”ūź│ų┴”▀Mąą┐žųŲŻ¼ ┐╔ęįīŹ¼Fī”ęū╦ķ╬’¾w(╚ńļuĄ░Ą╚)▀Mąąūź│ų╝░▓┘ū„ĪŻČÓųĖņ`Ū╔╩ųĄ─ÖCąĄ▒Š¾wę╗░Ń▌^ąĪŻ¼ūįė╔ Č╚ėų▌^ČÓŻ¼╣╩ČÓ▓╔ė├╦┼Ę■ļŖÖC═©▀^ėą╠ū╣▄Ą─õōĮz╗“─ß²ł└K▀Mąą▀hŠÓļx“īäėŻ¼┐žųŲ╦┼Ę■ļŖÖC ▀Mąąėąą“Ą─▐DäėŻ¼┐╔╩╣ČÓųĖņ`Ū╔╩ų═Ļ│╔Ė„ĘNūź│ų╝░▓┘ū„ĪŻė╔ė┌└KūėĄ─ūāą╬╝░└Kūė┼c╠ū╣▄ķg Ą──”▓┴Ż¼ĻP╣Øų«ķgĄ─±Ņ║ŽŻ¼╩╣Ą├ČÓųĖņ`Ū╔╩ų▒╚ę╗░ŃĄ─ÖCŲ„╚╦Š▀ėąĖ³ÅŖĄ─ĘŪŠĆąįĪŻ─┐Ū░Ż¼ī” ČÓųĖņ`Ū╔╩ųĄ─ųŪ─▄ūź│ųĄ─蹊┐║═╬╗ų├/┴”ģfš{┐žųŲĄ─蹊┐╩ŪÖCŲ„╚╦īW蹊┐Ą─¤ß³cų«ę╗ĪŻ
Ž┬├µĮķĮBė├Įø▀^ė¢ŠÜĄ─ČÓīėŪ░üŠWĮjū„×ķ┐žųŲŲ„Ż¼┐žųŲČÓųĖņ`Ū╔╩ųĄ─ĻP╣ØĖ·█ÖĮoČ©Ą─▄ē█EŻ¼ęį╝░ī”ŠWĮjĮYśŗĪóīW┴Ģ╦ŃĘ©Īó┐žųŲŽĄĮy▄øė▓╝■ĮM│╔ęį╝░īŹ“×ĮY╣¹Ą╚ĪŻ
1. ŠWĮjĮYśŗ╝░īW┴Ģ╦ŃĘ©
▒ŠŽĄĮy▓╔ė├ę╗éĆ3Ī┴20Ī┴1Ą─╚²īėŪ░üŠWĮjüĒīW┴ĢįŁėąĄ─┐žųŲŲ„Ą─▌ö╚ļ▌ö│÷ĻPŽĄĪŻ╔± Įøį¬▓╔ė├S ą╬║»öĄŻ¼╝┤y=1/(1+e') ĪŻ īW┴ĢĮY╩°║¾Ż¼ė├┤╦Ū░üŠWĮj«öū„┐žųŲŲ„ĪŻū„×ķŠW ĮjīW┴Ģśė░ÕĄ─┐žųŲŲ„Ż¼╩ŪĮøīŹ█`“×ūC│╔╣”Ą─┐žųŲŲ„ĪŻ└¹ė├▀@éĆ┐žųŲŲ„«a╔·Ą─▌ö╚ļ▌ö│÷öĄō■ ī”Ż¼╣®ŠWĮj▀MąąīW┴ĢŻ¼ė¢ŠÜ║├Ą─ŠWĮj┐╔ęį║▄║├Ąž▒ŲĮ³įŁ┐žųŲŲ„Ą─▌ö╚ļ▌ö│÷ė│╔õĻPŽĄĪŻ
īW┴Ģ▓╔ė├BP ╦ŃĘ©┼c┌ģ╗»╦ŃĘ©ŽÓĮY║ŽĄ─╗ņ║ŽīW┴Ģ╦ŃĘ©Ż¼╝┤Ž╚ė├ BP ╦ŃĘ©ī”ŠWĮj▀Mąąė¢ ŠÜŻ¼╚╗║¾į┘ė├┌ģ╗»╦ŃĘ©ė¢ŠÜĪŻīŹ█`ūC├„▀@ĘN╗ņ║ŽīW┴Ģ╦ŃĘ©─▄ē“▒▄├ŌŠų▓┐śOąĪųĄŪę▒╚å╬dė├ ā╔š▀ųą╚╬ę╗╦ŃĘ©Š▀ėą▌^┐ņĄ─╩šö┐╦┘Č╚ĪŻ BP ╦ŃĘ©╩ŪZ│ŻęŖĄ─īW┴Ģ╦ŃĘ©Ż¼į┌┤╦▓╗ČÓ╩÷ĪŻ┌ģ╗» ╦ŃĘ©ė╔ Bremermann ║═ Anderson ╠ß│÷Ż¼ė╚Ųõ▀m║Žė┌╠Ä└ĒäėæBŠWĮjĄ─ė¢ŠÜå¢Ņ}Ż¼▀@└’╦∙ė├ Ą─┌ģ╗»╦ŃĘ©╚ńŽ┬Ż║
1)░čÖÓųžW įO×ķ[- 0 . 1,0 . 1]╔ŽĄ─ļSÖC│§ųĄŻ¼╝┤WĪŻ;
2)░čśė▒Š▌ö╚ļŠWĮj▓óėŗ╦ŃŠWĮj▌ö│÷Ż╗
3)Ū¾─┐ś╦║»öĄJ Ą─ųĄŻ¼▓ó┴Ņ B₁=J;
4)«a╔·┼cÖÓųžW ŠSöĄŽÓ═¼Īó┴ŃŠ∙ųĄĄ─[- 1,+1]╔Žš²æBĘų▓╝Ą─ļSÖCŽ“┴┐WĪõ;
5 ) ┴ŅW=W ĪŻ+a Ī┴WĪõ,a<1, ╩Ūę╗īŹŽĄöĄŻ╗
6)Ū¾─┐ś╦║»öĄJ Ą─ųĄŻ¼┴Ņ B₂=J;
7 ) ╚ń ╣¹E₂
2. ╗∙ė┌╔±ĮøŠWĮjĄ─┐žųŲŲ„įOėŗ
(1)┐žųŲŽĄĮyė▓╝■
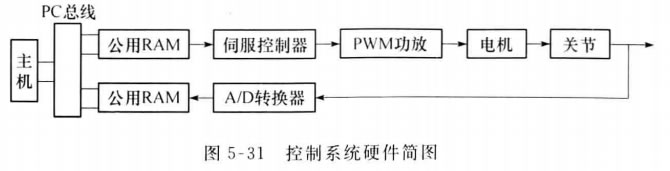
▒ŠŽĄĮyęį▒▒Š®║Į┐š║Į╠ņ┤¾īWÖCŲ„╚╦蹊┐╦∙Ą─╚²ųĖņ`Ū╔╩ųū„×ķīŹ“×┤▓Ż¼Ųõ┐žųŲŲ„▓╔ė├Ęų JĮYśŗŻ¼╔Žīėų„ÖC╩ŪPCĪ¬386, žōž¤▀Mąą╚╦ÖCą┼ŽóĮ╗ōQĪó╚╬äšęÄäØ║═┬ĘÅĮęÄäØĪŻŽ┬īė╩Ū╦┼ Ę■┐žųŲŲ„Ż¼╝┤ī”æ¬├┐éĆļŖÖCėąę╗éĆ╗∙ė┌PC ┐éŠĆĄ─8031å╬Ų¼ÖCĄ─╬╗ų├╦┼Ę■┐žųŲŲ„ĪŻłD5-31 ×ķ┐žųŲŲ„Ą─ė▓╝■║åłDĪŻłDųąĄ─╩ųųĖĻP╣Ø▓┐╬╗░▓čbėąļŖ╬╗ėŗŻ¼ė├ū„ĮŪČ╚é„ĖąŲ„Ż¼Ųõ▌ö│÷ą┼╠¢ ū„×ķ╦┼Ę■┐žųŲŲ„Ą─Ę┤üą┼╠¢ĪŻ
(2)┐žųŲŽĄĮy▄ø╝■įOėŗ
┐žųŲ▄ø╝■Ęų×ķā╔▓┐ĘųŻ¼╔Ž╬╗ÖC▄ø╝■ė├C šZčįŠÄīæŻ¼╦┼Ę■┐žųŲŲ„Ą─▄ø╝■ė├MCS-51 å╬Ų¼ÖCģRŠÄšZčįŠÄīæĪŻłD5-32╩Ū┐žųŲŲ„Ą─ĮYśŗłDĪŻ╔Ž╬╗ÖC▄ø╝■žōž¤Ė∙ō■š`▓Ņą┼╠¢Ż¼ėŗ╦ŃŠW Įj▌ö│÷▓ó«a╔·ŽÓæ¬Ą─┐žųŲą┼╠¢ĪŻ╦┼Ę■┐žųŲŲ„Å─ų„ÖCĄ├ĄĮ┐žųŲųĖ┴ŅŻ¼▀Mąą▀m«öĄ─╠Ä└Ē║¾Ż¼«a╔·ŽÓæ¬Ą─PWM ļŖÖC┐žųŲą┼╠¢┐žųŲļŖÖC▐DäėĪŻī”╔±ĮøŠWĮjĄ─ėŗ╦Ń╚½ė╔╔Ž╬╗ÖC═Ļ│╔Ż¼▀@╩Ūę“ ×ķ╔±ĮøŠWĮjĄ─ėŗ╦Ń░³└©┤¾┴┐Ą─ĘŪŠĆąį║»öĄ.ė├ģRŠÄšZčįīŹ¼F╩«Ęų└¦ļyŪę╦┘Č╚║▄┬²ĪŻłD5-33 ╩Ūų„ÖC▄ø╝■┴„│╠łDŻ¼ŲõųąČ©ĢrŲ„Ą─ū„ė├╩Ū▒ŻūC40ms ▀Mąąę╗┤╬▓ÕųĄŻ¼└¹ė├╔Ž╬╗ÖCĄ─ CMOS Č©ĢrüĒīŹ¼FŻ¼┐╔ęį£╩┤_ĄĮ╬ó├ļJĪŻ
(3)Å═║Ž┐žųŲĘĮĘ©
═©▀^īŹ“×░l¼FŻ¼å╬╝āė├╔±ĮøŠWĮj┐žųŲŲ„▀Mąą┐žųŲŻ¼ŽĄĮy Ą─Ēææ¬į┌Ė·█ÖļAČ╬┐╔ęį║▄║├ĄžĖ·█ÖĮoČ©Ą─▄ē█EŻ¼Ą½ĘĆæBą¦╣¹ ▓╗║├Ż¼┤µį┌▌^┤¾Ą─ĘĆæBš`▓ŅĪŻ▀@╩Ūę“×ķ╔±ĮøŠWĮj─▄ē“īW┴ĢįŁ üĒĄ─┐žųŲŲ„Ą─▌ö╚ļ▌ö│÷ė│╔õĻPŽĄŻ¼Ą½▓ó▓╗─▄═Ļ╚½Å═¼F▀@ĘNĻP ŽĄŻ¼┐éėąę╗Č©Ą─š`▓ŅŻ¼Č°Ūęš`▓ŅąĪĄĮę╗Č©Ą─ĘČć·║¾Ż¼į┘Žļ▀M ę╗▓Į£pąĪŠ═ūāĄ├╩«Ęų└¦ļyĪŻė╔ė┌ĢrķgŽ▐ųŲŻ¼ŠWĮjīW┴Ģų╗─▄Ą├ ĄĮę╗éĆĮ³╦ŲĄ─Zā×ĮŌŻ¼Č°▓╗┐╔─▄Ą├ĄĮšµš²Ą─Zā×ĮŌĪŻ×ķ┴╦╩╣ ŽĄĮyŠ▀ėą┴╝║├Ą─ĘĆæBĒææ¬Ż¼▓╔ė├ę╗éĆPID ┐žųŲŲ„į┌ĘĆæBĢrī” ŽĄĮy▀Mąą┐žųŲŻ¼└¹ė├ŲõĘeĘųū„ė├üĒŽ¹│²ĘĆæBš`▓ŅŻ¼īŹ“×ĮY╣¹ ▒Ē├„▀@ĘNÅ═║Ž┐žųŲŲ„─▄▒ŻūCŽĄĮyŠ▀ėą┴╝║├Ą─ĘĆæBĒææ¬ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |