| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
╚╦Ą─ęĢėX╩Ū╬ęéā½@ų¬═ŌĮńą┼ŽóĄ─ų„ę¬═ŠÅĮŻ¼ęĢėX─▄ē“ Ä═ų·╬ęéāī”┐šķgŅl┬╩ĪóĢrķgŅl┬╩ęį╝░ī”▀\äė╬’¾w▀MąąĖąų¬ĪŻ
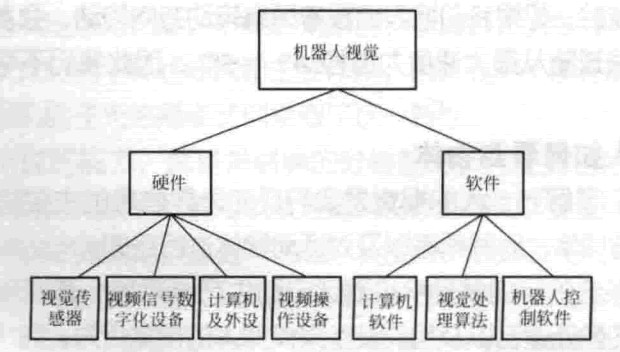
ÖCŲ„ęĢėXŽĄĮyĄ──┐Ą─Š═╩ŪĮoÖCŲ„╗“ūįäė╔·«aŠĆ╠Ē╝ėę╗╠ūęĢėXŽĄĮyŻ¼ŲõįŁ└Ē╩Ūė╔ėŗ╦ŃÖC╗“łDŽ±╠Ä└ĒŲ„ęį╝░ŽÓĻPįOéõüĒ─ŻöM╚╦Ą─ęĢėXąą×ķŻ¼═Ļ│╔Ą├ĄĮ╚╦Ą─ęĢėX ŽĄĮy╦∙Ą├ĄĮĄ─ą┼ŽóĪŻ╚╦Ą─ęĢėXŽĄĮy╩Ūė╔č█Ū“Īó╔±ĮøŽĄĮy╝░┤¾─XĄ─ęĢėXųąśąśŗ│╔Ż¼ ėŗ╦ŃÖCęĢėXŽĄĮyät╩Ūė╔łDŽ±▓╔╝»ŽĄĮyĪółDŽ±╠Ä└ĒŽĄĮy╝░ą┼ŽóŠC║ŽĘų╬÷╠Ä└ĒŽĄĮyśŗ│╔ĪŻÖCŲ„╚╦Ą─ęĢėXŻ¼┤¾Ė┼┐╔ęį└ĒĮŌ×ķĪ░ęĢĪ▒║═Ī░ėXĪ▒ ā╔▓┐ĘųŻ¼įöĮŌ╚ńłD4-6╦∙╩ŠĪŻ
Å─łD4-5╬ęéā▓╗ļy┐┤│÷Ż¼ÖCŲ„╚╦Ą─ęĢėXŽĄĮy┐éĄ─šfüĒė╔ė▓╝■║═▄ø╝■ā╔┤¾▓┐ĘųĮM│╔ĪŻ
(1)ė▓╝■▓┐Ęų
ó┘ęĢėXé„ĖąŲ„Ż¼╝┤CCD ╗“ š▀CMOS özŽ±Ņ^Ż╗
ó┌ęĢŅlą┼╠¢öĄūų╗»įOéõŻ¼╝┤łDŽ±▓╔╝»┐©Ż¼╦³Ą─ ╚╬äš╩Ū░čözŽ±Ņ^▌ö│÷Ą─╚½ļŖęĢą┼╠¢▐D╗»│╔ėŗ╦ŃÖCĘĮ▒Ń ╩╣ė├Ą─öĄūųą┼╠¢Ż╗
ó█ėŗ╦ŃÖC╝░═ŌįOŻ¼Ė∙ō■ŽĄĮyĄ─ąĶę¬┐╔ęį▀xė├▓╗ ═¼Ą─ėŗ╦ŃÖC╝░Ųõ═ŌįOŻ¼üĒØMūŃÖCŲ„╚╦ęĢėXą┼Žó╠Ä└Ē╝░ ÖCŲ„╚╦┐žųŲĄ─ąĶę¬ĪŻė╔ė┌ USB Įė┐┌╝╝ągĄ─│÷¼FŻ¼ąĪą═özŽ±ÖC┐╔ęįų▒Įė┼cėŗ╦ŃÖCŽÓ▀BŻ¼īŹ¼FŁhŠ│łDŽ±Ą─┐ņ╦┘▓╔╝»é„╦═Ż¼ŪęŅAįOöĄō■╠Ä └ĒŽĄĮy┼cłDŽ±▓╔╝»ŽĄĮyķgĄ─Įė┐┌ĪŻ
(2)▄ø╝■▓┐Ęų
ó┘ėŗ╦ŃÖCŽĄĮy▄ø╝■Ż¼▀xė├▓╗═¼ŅÉą═Ą─ėŗ╦ŃÖCŻ¼Š═ėą▓╗═¼Ą─▓┘ū„ŽĄĮy║═╦∙ų¦ ō╬Ą─Ė„ĘNšZčįĄ╚Ż¼«ö╚╗ę▓┐╔ęį▓╔ė├ĄūīėĘĮĘ©╠Ä└ĒłDŽ±ą┼ŽóŻ¼ęį╩ĪĄ¶▓┘ū„ŽĄĮyĦüĒ Ą─┬ķ¤®ĪŻ
ó┌ÖCŲ„╚╦ęĢėXą┼Žó╠Ä└Ē╦ŃĘ©Ż¼░³└©łDŽ±ŅA╠Ä└ĒĪóĘųĖŅĪóūRäe║═ĮŌßīĄ╚ ╦ŃĘ© ĪŻ
ÖCŲ„╚╦ęĢėXŽĄĮy╩Ūė├ėŗ╦ŃÖCüĒīŹ¼F╚╦Ą─ęĢėX╣”─▄Ż¼ę▓Š═╩Ūė├ėŗ╦ŃÖCüĒīŹ¼F ī”┐═ė^╩└ĮńĄ─ūRäeĪŻįōŽĄĮyų„ę¬ė╔╚²▓┐ĘųĮM│╔Ż║łDŽ±▓╔╝»▓┐╝■ĪółDŽ±Ą─╠Ä└Ē║═Ęų╬÷Īó╠Ä└ĒĮY╣¹▌ö│÷čbų├Ż¼ŲõįŁ└ĒłD╚ńłD4-7╦∙╩ŠĪŻ
ó┘łDŽ±▓╔╝»▓┐╝■Ż║įŁ╩╝Ą─łDŽ±öĄō■╩Ū═©▀^łDŽ±▓╔╝»▓┐╝■▀M╚ļėŗ╦ŃÖCĄ─Ż¼ ę“Č°łDŽ±▓╔╝»▓┐╝■Ą─ū„ė├╩Ū▓╔╝»įŁ╩╝Ą──ŻöMłDŽ±öĄō■Ż¼▓óīó─ŻöMą┼╠¢▐DōQ│╔ öĄūųą┼╠¢ĪŻėŗ╦ŃÖCį┌Įė╩šĄĮłDŽ±Ą─öĄūųą┼╠¢║¾Ż¼īóŲõ┤µ╚ļā╚┤µģ^ĪŻ│Żė├Ą─łD Ž±▓╔╝»▓┐╝■ėą│╔Ž±└ū▀_ĪóCCD özŽ±Ņ^╝ė╔ŽłDŽ±▓╔╝»┐©ĪółDŽ±Æ▀├ĶāxĪóöĄ┤aöz Ž±ÖCĄ╚ĪŻ
ó┌łDŽ±ą┼Žó╠Ä└ĒŲ„Ż║łDŽ±Ą─╠Ä└Ē╣żū„═©│Ż╩Ūė╔ėŗ╦ŃÖC═Ļ│╔Ą─Ż¼Įø▀^▓╔╝»┐© īó─ŻöMą┼╠¢▐DōQ×ķöĄūųą┼╠¢║¾Ż¼łDŽ±ą┼Žóį┌ėŗ╦ŃÖCųąīŹ¼FŅA╠Ä└ĒĪó╠žš„│ķ╚Ī(łD Ž±Ęų╬÷)Īó─Ż╩ĮūRäeĪóųžśŗĪó├Ķ╩÷Īó┼ąöÓĪóøQ▓▀Ą╚ę╗ŽĄ┴ąĄ─╠Ä└ĒĪŻ
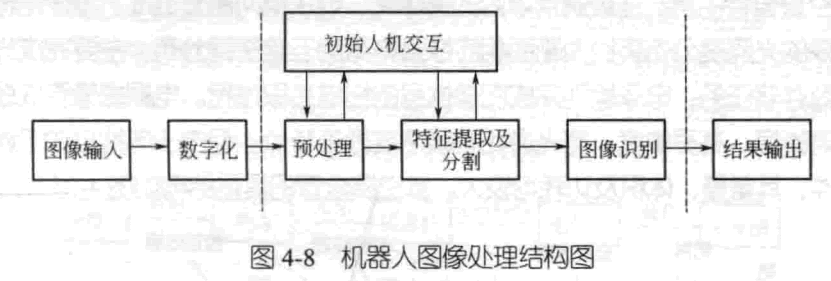
ó█╠Ä└ĒĮY╣¹▌ö│÷(ÖCÖCĮė┐┌║═╚╦ÖCĮėĪ§):ūRäeą┼ŽóĄ─▌ö│÷╩ŪłDŽ±╠Ä└ĒĄ─ ZĮK─┐Ą─ĪŻÅ─ÅV┴xĄ─ĮŪČ╚ųvŻ¼ą┼ŽóĄ─▌ö│÷ą╬╩Į┐╔Ęų×ķā╔ĘNŻ║ę╗ĘN╩ŪĖ∙ō■ūRäeĄ─ĮY ╣¹ū„│÷┼ąöÓŻ¼═©│ŻęįĘ¹╠¢ą┼ŽóĄ─ą╬╩Į▌ö│÷Ż╗┴Ēę╗ĘN╩ŪęįłDŽ±ą╬╩Į▌ö│÷ĪŻÖCŲ„╚╦łD Ž±╠Ä└ĒĄ─ĮYśŗłD╚ńłD4-8╦∙╩ŠĪŻ
│ŻęŖĄ─özŽ±Ņ^┤¾ų┬┐╔ęįĘų×ķā╔ŅÉŻ¼╝┤å╬─┐özŽ±Ņ^║═ļp─┐özŽ± Ņ^ĪŻ╦∙ų^Ą─å╬─┐özŽ±Ņ^Ż¼Š═╩Ūę╗ĘNų╗─▄┐┤ĄĮŲĮ├µŻ¼¤oĘ©½@╚ĪŠÓļxą┼ŽóĄ─özŽ±Ņ^ĪŻ ▀@śėĄ─özŽ±Ņ^į┌╬ęéāĄ─╔·╗ŅųąĘŪ│Ż│ŻęŖŻ¼╣Pėø▒ŠļŖ─X╗“š▀╩ųÖCā╚ų├Ą─özŽ±Ņ^Ż¼ęį ╝░ŽÓÖCözŽ±ÖCĄ─ńRŅ^┤¾ČÓČ╝╩Ūå╬─┐ĪŻĄ½╩Ūę¬╩Ū╩╣Ą├ÖCŲ„╚╦─▄ē“£╩┤_Ąž▀\äėĄĮ╬ęéā Žļę¬╦³▀\äėĄĮĄ─ĄžĘĮŻ¼─Ū├┤ÖCŲ„╚╦Š═ę¬ī”╦³╦∙╠ÄĄ─ŁhŠ│ėąę╗Č©Ą─┴╦ĮŌŻ¼▓┼─▄ŽÓī” £╩┤_Ąž½@╚Ī╦³ę¬ū▀Ą─┬ĘÅĮĪŻ╦∙ęį▀@Š═ąĶę¬ÖCŲ„╚╦ī”╦³ų▄ć·╬’¾wĄ─╬╗ų├ėąéĆ£╩┤_Ą─ ┴╦ĮŌŻ¼▀@Š═▓╗āHąĶę¬ÖCŲ„╚╦┐┤ĄĮ─ŪéĆ╬’¾wŻ¼▀ĆąĶę¬ÖCŲ„╚╦£╩┤_Ąž£y│÷╦³┼c╬’¾wķg Ą─ŠÓļxĪŻČ°─▄īŹ¼F▀@ę╗╣”─▄Ą─Š═╩Ūļp─┐özŽ±Ņ^ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |